

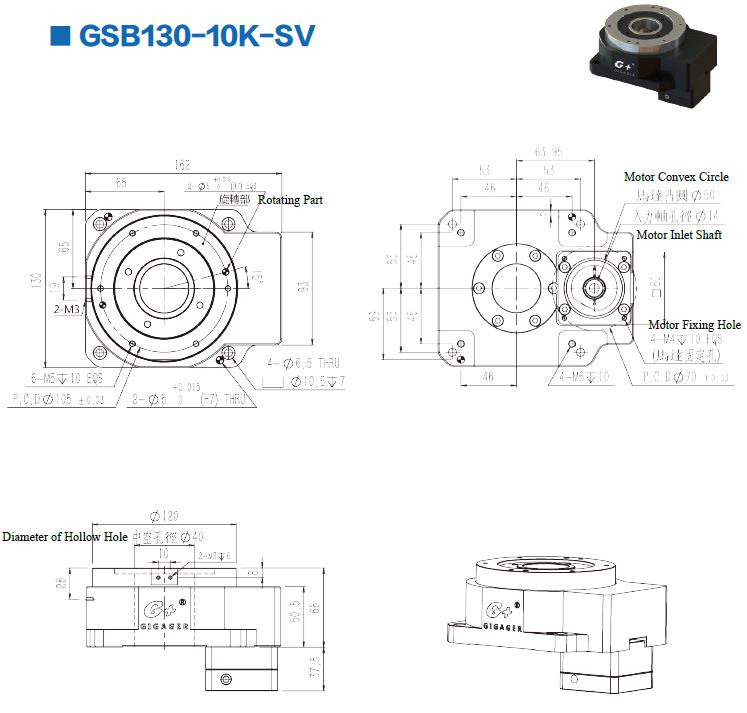
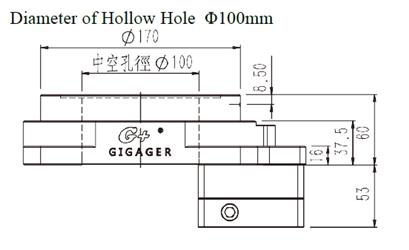
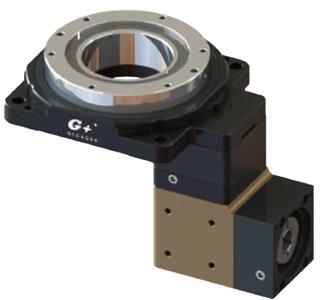
Jest to numer modelu pustego stołu obrotowego GSB130-10K-SV o rozmiarze stołu 130 mm w stosunku 1:10 dla silnika serwo. Stół obrotowy GIGAGER Hollow, zwany także Hollow Rotary Stage, który został zaprojektowany specjalnie dla przekładni serwo silnika do zastosowań sterowania ruchem. Może być stosowany na maszynie do testowania CCD i wykorzystuje w pełni elastyczność serwomotoru, dając projektantom większą swobodę w projektowaniu mechanizmów.
1. Specyfikacja modelu GSB130-10K-SV
Parametr | ||
Typ silnika | Silnik o mocy 200-400 W SV | |
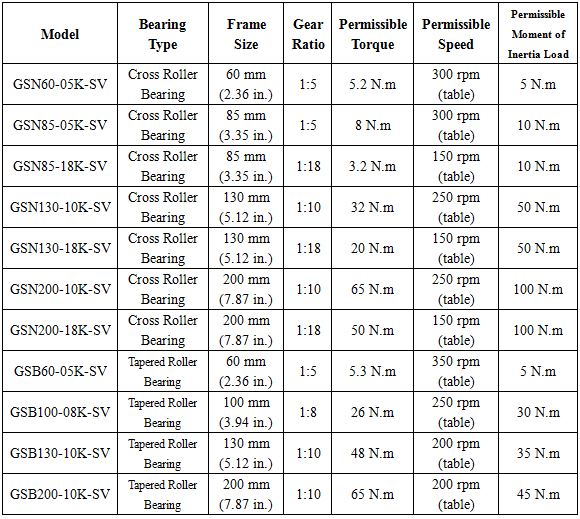
Obrotowe łożysko platformy | Stożkowe łożyska wałeczkowe | |
Dopuszczalny moment obrotowy | Nm | 48 |
Dopuszczalna prędkość | rpm | 200 (powierzchnia stołu) |
Przełożenie | 1:10 | |
Moment bezwładności | kg.m 2 | 9216 × 10-6 |
Dopuszczalne obciążenie osiowe | N | 250 |
Dopuszczalny moment bezwładności | Nm | 35 |
Dokładność pozycjonowania | min | ≦ 1 |
Powtarzalność | sec | ± 5 (0,001 °) |
Płaskość platformy | mm | ± 0,005 |
Koncentryczność platformy | mm | ± 0,01 |
Stopień ochrony | IP | 40 |
Precyzyjna żywotność | H | 20000 |
Waga | kg | 4.6 |
Parametr silnika | ||
Marka | Kod | Model |
Fuji | fa | GYS 201D5 |
Mitsubishi | M | HF-KFS-23/43 |
Panasonic | P | MSMD-022/042 |
SANYO | S | Q1AA06020D |
Yaskawa | Y | SGMAH-02 / 04A |
orientalny | O | DX220 / 240 |
Delta | T | ECMA-C30602 / 04 |
* Silnik serwosilnika jest konfigurowany przez klienta. Powyższy model służy wyłącznie jako odniesienie
2. Co to jest pusty stół obrotowy?


3. Jakie są cechy produktu z pustego stołu obrotowego typu SV?




4. Konfiguracja systemu stołu obrotowego typu SV


5. Ile modeli SV jest dostępnych?
6. Jak osiągnąć większy wynik przekładni?


Kombinacja pustego stołu obrotowego z planetarnym reduktorem


Kombinacja pustego stołu obrotowego z reduktorem z kątem prostym

7. Jaki rodzaj urządzenia może wykorzystywać obrotowy siłownik obrotowy?


Link do filmu demo:
za. Wersja demonstracyjna testu Gyro https://youtu.be/PwKiObIMXRM
b. Demo na 4. osi lub 5. osi https://youtu.be/L9gheXQ6zLc
Aby zobaczyć więcej filmów, kliknij GIGAGER Youtube Channel: https://www.youtube.com/playlist?list=PLT-2VrhPP3YItwfN_wA4YkS8bzfBpJu39
8. Dlaczego warto wybrać GIGAGER?




9. FAQ


10. Powiązana wiedza
Stoły obrotowe GIGAGER Hollow zapewniają doskonałe możliwości przyspieszania i precyzyjne, jednorodne ruchy. Stoły obrotowe GIGAGER Hollow są bezluzowe, o wysokiej sztywności, zoptymalizowane pod kątem wysokich momentów obrotowych, mają solidną dynamikę i są szczególnie dobrze dostosowane do zadań w szerokim zakresie procesów automatyzacji. Dostępne są różne wielkości średnicy i wysokości z opcją dodania serwonapędu lub zintegrowanego silnika krokowego dla kompletnego rozwiązania typu plug and play.
Punkty wyboru reduktora prędkości:
1. Określ cel i wybierz współczynnik bezpieczeństwa zgodnie z aplikacją.
2. Temperatura otoczenia wokół reduktora (określająca sprawdzenie mocy cieplnej reduktora);
3. Wyznaczyć prędkość roboczą maszyny i obliczyć współczynnik redukcji reduktora w oparciu o tę prędkość (współczynnik redukcji = prędkość obrotowa wału wejściowego / prędkość wyjściowa wału = prędkość silnika / wymagana prędkość mechaniczna);
4. Oblicz moment obrotowy obciążenia, wybierz wyjście reduktora zgodnie z tym momentem (patrz "wyjściowy miernik momentu obrotowego" dostarczony przez producenta reduktora) i określ model reduktora;
5. Określić dodatkowe funkcje reduktora, takie jak hamulec silnikowy, hamulec pod napięciem, konwersja częstotliwości, konstrukcja zamknięta, bezobsługowy materiał powłoki itp.
6. Wał wejściowy i wał wyjściowy mogą wytrzymać maksymalne obciążenie promieniowe w środkowej części przedłużenia wału. To powinno być sprawdzone. Jeżeli przekracza wymagania, producent powinien być zobowiązany do zwiększenia średnicy wału i zwiększenia łożyska.
Jak wybrać dopasowany silnik i reduktor?
Po pierwsze, odpowiedni zasilacz powinien być wybrany zgodnie z napięciem roboczym silnika. Następnie, zgodnie z wymaganą prędkością i prędkością silnika, należy uzyskać wymagany współczynnik przełożenia, a następnie określić współczynnik przełożenia istniejącej skrzyni biegów, aby ustalić stosunek przełożenia pociągu.
Ostatecznie przełożenie przekładni określa się na podstawie przełożenia skrzyni biegów, a następnie odpowiedni promień przekładni i materiał koła zębatego dobiera się za pomocą analizy mechanicznej. Wreszcie, narzędzia obróbkowe mogą być używane po montażu i debugowaniu.
Poszczególne kroki:
1. Oblicz wymagany moment obrotowy i prędkość zgodnie z parametrami działającej maszyny i obliczyć przybliżoną moc.
2. Sprawdź moment znamionowy silnika zgodnie z mocą. Maksymalny moment obrotowy silnika wynosi 1450 obr / min.
3. Zgodnie z wymaganym momentem obrotowym / momentem znamionowym silnika jest to współczynnik redukcji reduktora. W tej chwili nie została ostatecznie wybrana i sprawdza się, czy prędkość obrotowa przy tym współczynniku redukcji spełnia wymagania. Jeśli jest większa niż wymagana prędkość, spełnia wymagania; jeśli prędkość jest zbyt mała, wymagany współczynnik redukcji jest obliczany zgodnie z prędkością.
W rzeczywistości są to wszystkie trzy parametry prędkości, momentu obrotowego i mocy. Wykonaj jedno z obliczeń, a następnie oblicz inne.
4. Istnieje wiele rodzajów reduktorów, w zależności od rodzaju wyboru.
5. Zwróć uwagę na ochronę reduktora. Po wybraniu reduktora, jego prędkość parametru i współczynnik przełożenia mają za sobą moc. Jest to maksymalna moc dozwolona przez reduktor i nie może być przekroczona. W przeciwnym razie reduktor może być przeciążony i uszkodzony.
6. Reduktor prędkości ma wiele czynników bezpieczeństwa w zależności od warunków pracy. Jeśli nie masz umiejętności, możesz wybrać skrzynię biegów pierwszego biegu po obliczeniu zgodnie z wymaganymi parametrami.
Popularne Tagi: pusty stół obrotowy do maszyny do testowania CCD, Chiny, producenci, dostawcy, fabryki, wysoka jakość





